センサーでしっかり把握 |

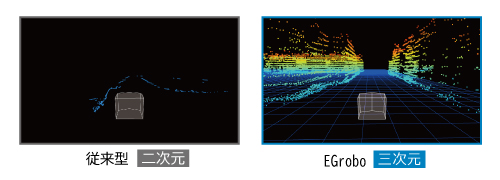
レーザーレンジセンサーで、周囲環境を三次元でモニタリングします。走行ルートの周囲を模様替えした場合でも、ロボットの位置や方向を正確に認識し、ティーチングの終点まで安全に走行できます。 |
 |

走行ルート上の障害物をレーザーレンジセンサーと超音波センサーの2種類のセンサーで検知し、回避や減速、走行停止を判断し安全に走行します。 |
 |
メニュー
|
|
センサーでしっかり把握 |
|
レーザーレンジセンサーで、周囲環境を三次元でモニタリングします。走行ルートの周囲を模様替えした場合でも、ロボットの位置や方向を正確に認識し、ティーチングの終点まで安全に走行できます。 |
|
|
走行ルート上の障害物をレーザーレンジセンサーと超音波センサーの2種類のセンサーで検知し、回避や減速、走行停止を判断し安全に走行します。 |
|